低性能手机也能跑得动?《明日之后》手游中大量的建筑物、车辆、石头等遮挡物,如何能被快速计算,以低功耗完成遮挡剔除的?
在GDC2023的核心会场(Core concept)中,网易游戏的资深引擎程序Tao介绍了
《明日之后》所使用的创新高性能软光栅遮挡剔除方案(SOC)。借助SOC方案,在低端手机平台(如 iPhone 6s)上,游戏每帧仅需要约1.5ms的消耗,能够完美适配动态场景,美术可以放心创造复杂精巧的场景而不用担心性能问题!
以下是演讲实录(根据现场英文演讲内容翻译整理):
本次演讲将跟大家分享我们是如何在《明日之后》项目中,
实现移动平台的高性能软光栅遮挡剔除方案的。演讲主要分为 3 个部分:轻量级软光栅遮挡剔除方案、优化剔除管线和离线生成遮挡网格。
首先介绍下背景信息。
《明日之后》是一款开放世界多人TPS手游。玩家要在末日世界中生存,探索废弃荒芜的城市、危险重重的森林,山脉和海洋,还要对抗怪物,收集资源以及建造营地。
先介绍下演讲中涉及的术语。
- 遮挡剔除(Occlusion Culling)是指当一个物体被其他物体遮挡时,不对其进行渲染。
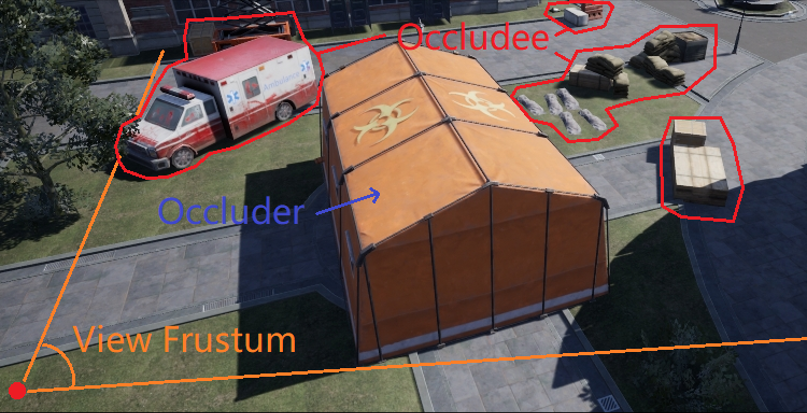
- 遮挡物(Occluder)是一些选定的大型物体,可以遮挡视线中的其他物体,就像这里的帐篷。
- 被遮挡物(Occludee)是场景中的所有可以被遮挡物遮挡的物体。
- 剔除率(Culling rate )是一种用于评估剔除算法有效性的指标,剔除率 = 剔除掉的物体或面片数 / 总的物体或面片数。
- 错误遮挡(False Occlusion)指由于剔除算法的误判,导致可见物体被错误遮挡的情况。这种情况下,剔除算法错误地认为某些物体或面片是不可见的,从而导致它们可能突然消失。
一、优化动机
由于《明日之后》是款手游,遮挡剔除可能会对移动平台的性能产生较大的影响。在
常规场景中,60%以上的对象可以被剔除,意味着这些物体不用渲染,从而帮助我们节省大量的时间。
然而,要设计针对移动平台的遮挡剔除解决方案,需要满足很多条件。
首先要满足的是
高剔除率,以及
无错误遮挡——这意味着没有可见对象被错误剔除。
该解决方案必须
支持静态对象和动态对象,而且占用的包体较小。
另外,也是非常关键的一点是,它得跑的很快。对于计算能力较弱的移动平台,这个要求非常的有挑战性。
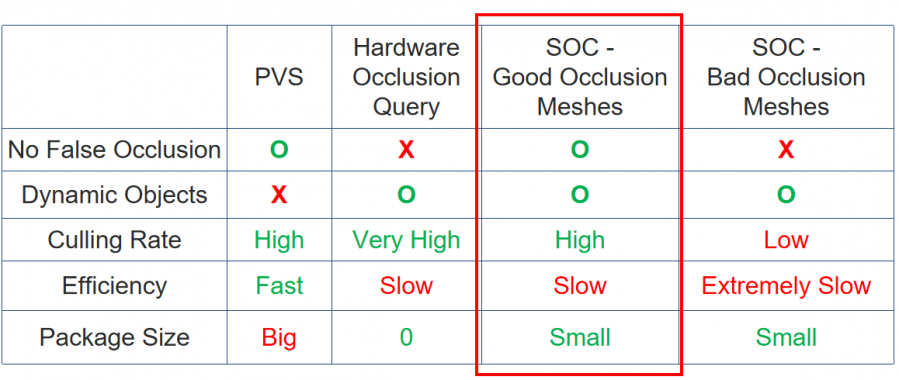
这里有一个表格,包含常见的遮挡剔除解决方案,潜在可视集合 (Potential Visible Set, 以下简称 PVS )、硬件遮挡查询、以及软件遮挡剔除,简称SOC。
可以看到,PVS不支持动态对象渲染,而硬件遮挡查询则导致出现了错误遮挡。
SOC 方案满足了我们的大部分要求,但是它的结果严重依赖于遮挡网格的质量,而且它在移动平台上运行太慢了。但我们最终还是选择使用 SOC 解决方案,但是需要做一些努力来解决这些问题。
我们的目标是,
尽可能提升 SOC 解决方案的速度,所以我们必须
针对移动平台优化算法,同时使用高质量的遮挡网格。
我们的方案
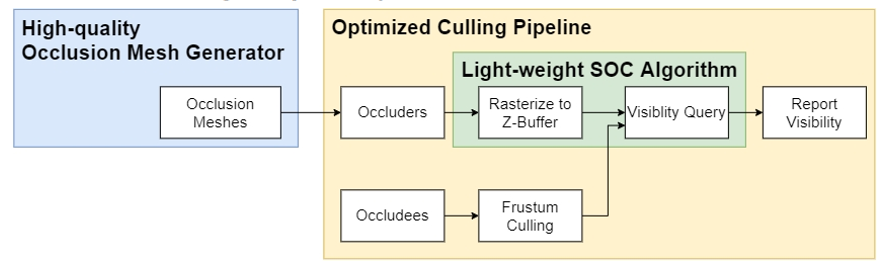
这里就要提到我们的高效软件遮挡剔除解决方案。
该方案由 3 个部分组成,一个用于
剔除的轻量级soc 算法,即图表中的绿色部分;一个用于
组织数据的优化管线,即黄色部分,以及用于
生成高质量遮挡网格的离线生成器,即蓝色部分。
在接下来的演讲部分,我会逐一解释以上三个部分。
二、剔除算法(Occlusion Mesh Generator)
让我们从第一部分开始,剔除算法。
该算法有 2 个目标。先是
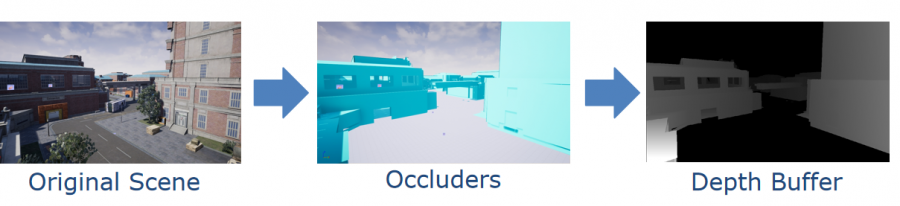
对选定的遮挡物光栅化,计算出深度值,存储在深度缓冲区中,
接着
使用这个深度缓冲区来做深度测试,判断被遮挡物的可见性。
2.1 传统SOC方案和轻量级SOC方案对比
传统SOC方案
作为对比,我简单介绍一下传统的“带遮罩的软件遮挡剔除方案”(Masked Software Occlusion Culling,MSOC),它是Intel在2016年提出的解决方案,也是现在PC和主机上的主流SOC实现方案。
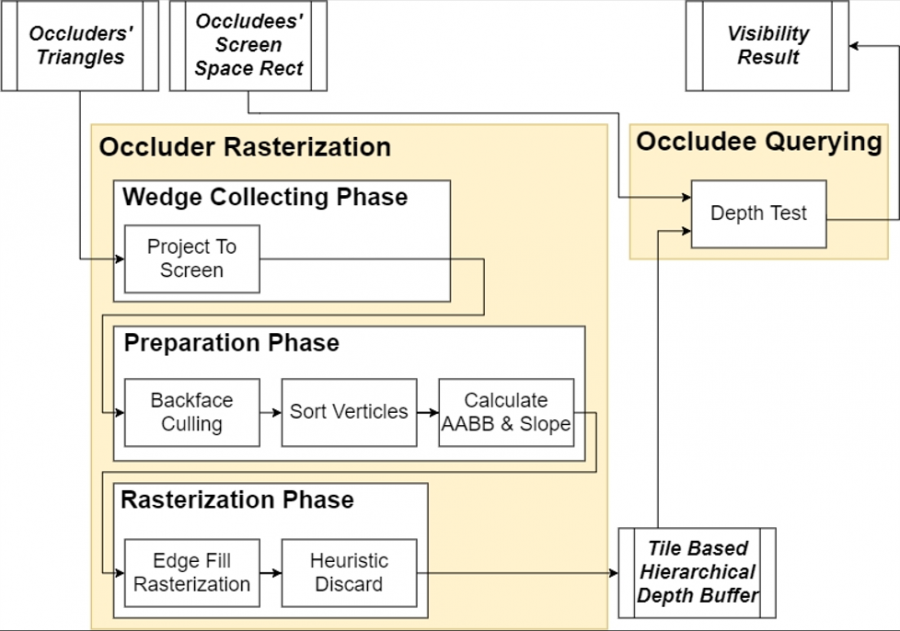
传统软件遮挡剔除方案(MSOC)流程图
该算法针对支持 AVX 的 CPU 进行了优化,具有分层深度缓冲区。它会收集遮挡物的三角形信息(wedge),然后使用“边缘填充光栅化算法”来检查并标记给定遮挡物三角形的覆盖像素, 再然后使用’启发式丢弃'算法,来更新深度缓冲区信息,从而得到新的深度值。
接着计算被遮挡物的屏幕矩形区域,对深度缓冲区进行遮挡查询。
轻量级SOC方案
接下来,再看看我们的轻量级SOC 软件遮挡剔除算法。
蓝色标记的步骤是我们与 MSOC 不同的地方。可以看到框架非常相似,但是在细节上进行了优化。
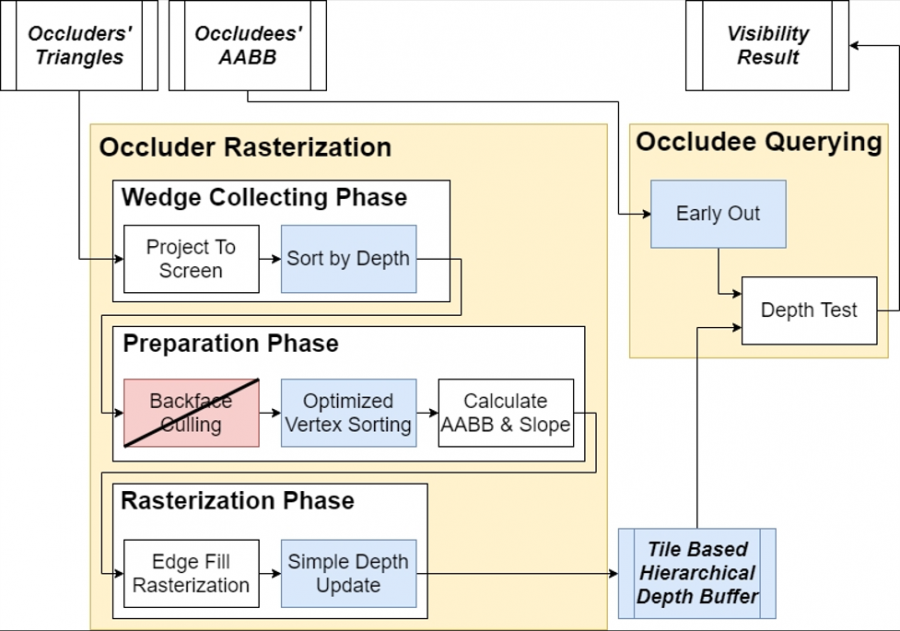
我们的轻量级SOC 软件遮挡剔除算法流程图
我们的算法也使用 SIMD 指令进行了优化。在移动平台上,SIMD 通常用Arm Neon技术实现。我们沿用了分层深度缓冲区的想法,但做了一些小的调整。
在对遮挡物光栅化部分,我们在准备阶段上进行了很大的改动:
不再使用背面剔除(BackfaceCulling),优化了顶点排序,并且在楔形信息收集阶段增加了一个额外的预排序步骤。准备之后,我们仍然使用边缘填充光栅化进行覆盖检测,但不再使用“启发式丢弃”过程,深度信息更新则回落到使用简单的写入方式。
在对被遮挡物进行可见性查询,我们在查询之前添加了一个
“Early Out(尽早退出循环或函数)”步骤。我将在后面的演讲内容观众详细介绍我们的算法,重点介绍我们创新的部分。
2.2 深度缓冲区和深度值存储
深度缓冲区结构
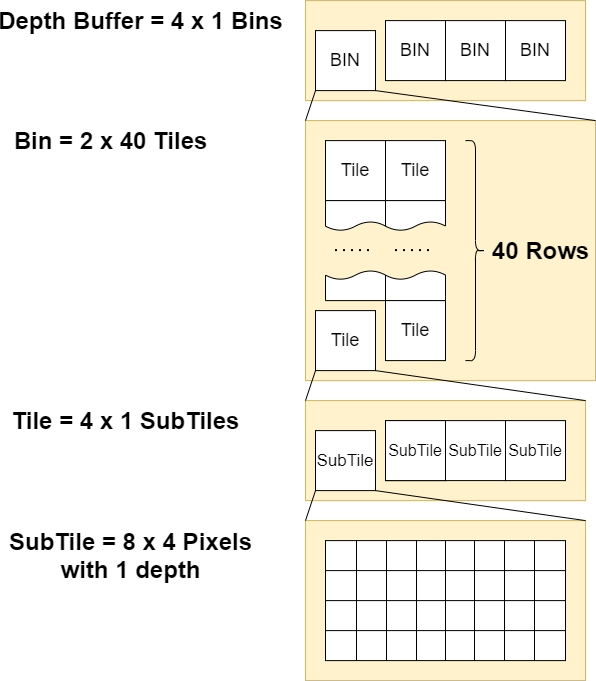
我们使用分辨率很低的深度缓冲区,比如 256x160。如图所示,整个缓冲区被分成 4 个 bin。每个 bin 进一步被划分为80 个图块。 每个图块又分为 4 个子图块。图块由 8*4 的像素块组成, 每个图块共享一个深度值。
最后,每个图块包含 128 个像素,对应一个 m128i;4 个深度值对应一个 m128,可以看成是4个float32。
深度缓冲区结构
存储深度值
在
存储深度值方面,我们也有一个小技巧。
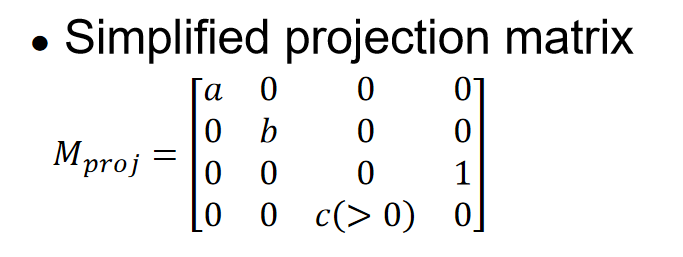
我们注意到深度值仅用于 Z 测试,所以真正重要的是相对大小。因此,我们使用反向Z (Reversed-Z) 投影来提高深度缓冲区精度。这也是常见的做法。
通过进一步修改投影矩阵,将远平面投影设置为0,可以更方便地设置深度缓冲区。最终的投影矩阵如下图所示。参数'c'可以是任何正实数。可以看到矩阵中只有4个非零项,比原始矩阵少1 个非零项,也就意味着投影速度加快了。实际上,如果你使用SIMD (Single Instruction Multiple Data,即单指令流多数据流)会快得多。
投影矩阵
2.3 楔形信息收集阶段(Wedge Collecting Phase)
接下来是处理过程。
在对遮挡物进行处理时,首先会经过楔形收集阶段。我们使用上文中所示的修改后的投影矩阵,将遮挡物投影到楔形板中。
对于每个三角形, 我们
只存储 1 个深度值,即只存储最远、最保守(即最严格)的深度值。然后,当所有遮挡物都完成投影时,
按照深度值对楔形内的物体进行排序。
我们为什么要进行这种
排序呢?
与 MSOC 中的启发式搜索方法类似,都是为了确保后续深度缓冲区的深度值更新。
使用
排序而不是“启发式丢弃”法,是因为我们考虑到了两个因素:
准确性和速度。
排序的准确性
排序的结果准确性更高。
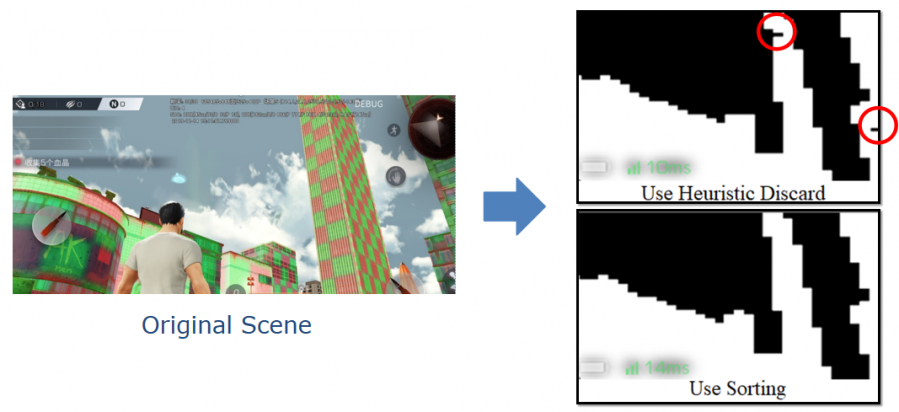
“启发式丢弃”,顾名思义, 是一种启发式算法,结果不稳定。在下图中,我们可以看到使用“启发式丢弃”法 时,沿着阴影边界的一些像素丢失了,而使用排序时,结果则显示正常。不要低估这个小问题。由于我们使用的是极低的分辨率,这可能会极大的影响剔除率。
“启发式丢弃”时边缘像素的丢失
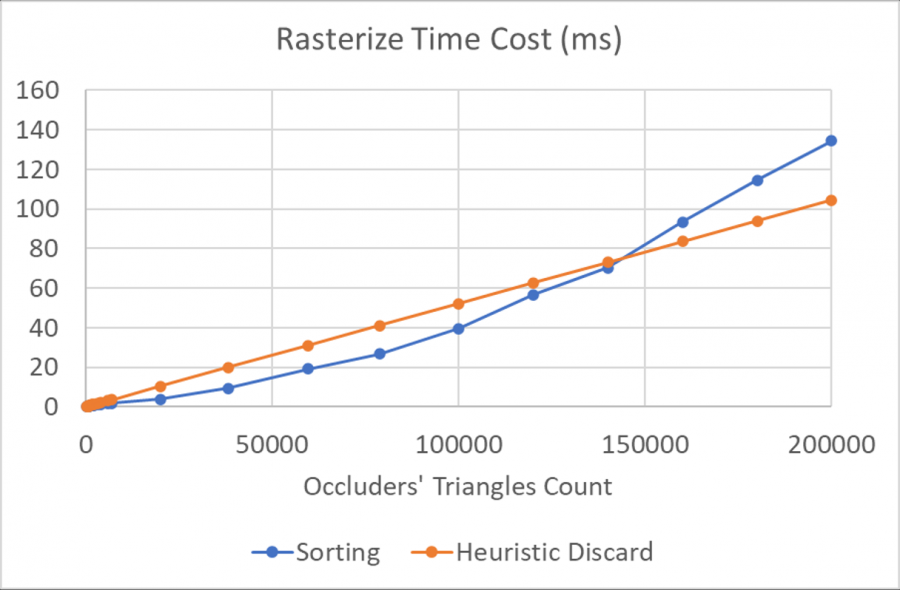
排序的渲染速度
而渲染速度则取决于需要处理的遮挡物三角形数量。
从上图中可以看出,三角形面数较多时,“启发式丢弃法”(橙线)效率更高,
三角形面数较少时,则排序法速度更快。在我们的解决方案中,输入的三角形面数非常少,甚至低于 4000。因此,排序法是更为合理的方案。
2.4 准备阶段(Preparation Phase)
接下来是准备阶段。
计算信息
首先,我们来计算信息,方便后续进行边缘填充算法。
需要计算的信息包括屏幕的楔形边界框以及每条边的斜率等。所有输入的三角形都被视为双面,并且按批次打包,通过 SIMD 指令批量进行处理。
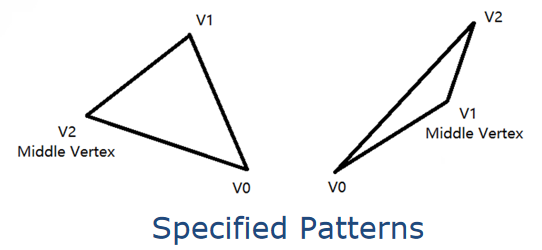
为了有效地从打包的SIMD数据中找到三角形的指定边,我们需要将信息打包在一些指定的图案中。
实际上,我们会将三角形顶点排列成 2 个指定的图案,如下图所示。因此,我们通过对顶点进行排序来形成三角形。
排序有 3 个目标:
- 逆时针
- V0 的 y 值最小
- 识别出哪个顶点的 y 值居中
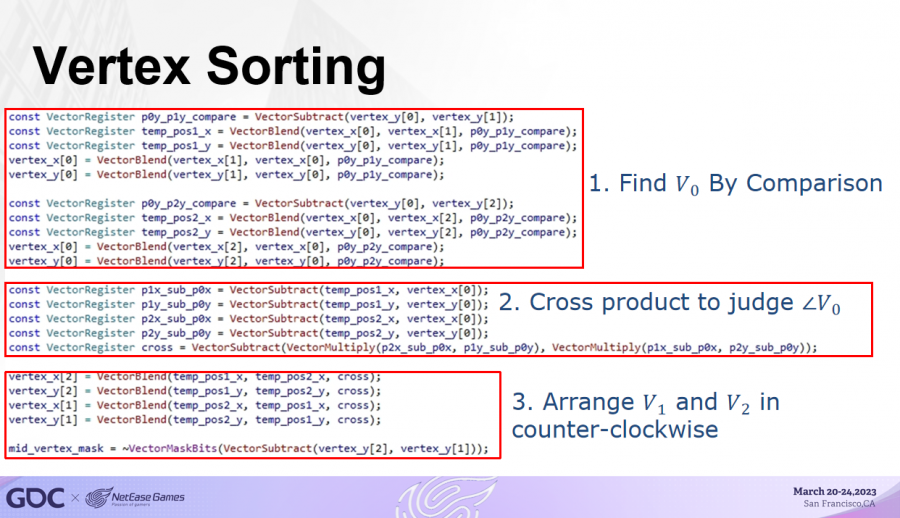
相比MSOC,我们需要完成的目标更多(“将顶点设置为逆时针方向”,这是一个额外的需求),但我们
通过最终使用比 MSOC更少的指令数完成了所有的目标,只用到了 22 条SIMD 指令。这其中的关键点在于,要意识到这个额外的目标事实上使我们放开了手脚,因为不必保留原始顶点顺序。
代码如下所示。我们通过简单比较找到顶点v0,计算出与其相邻的两个点v1和v2的向量,对这两个向量进行叉积运算,最后将v1和v2按照顺时针的方向排序。
2.5 光栅化阶段(Rasterization Phase)
接下来是光栅化阶段,也是最终的处理阶段。在这个阶段,我们将屏幕的楔形光栅化,存储到深度缓冲区中。其中包括两个步骤:覆盖检测和深度更新。
与 MSOC 一样,
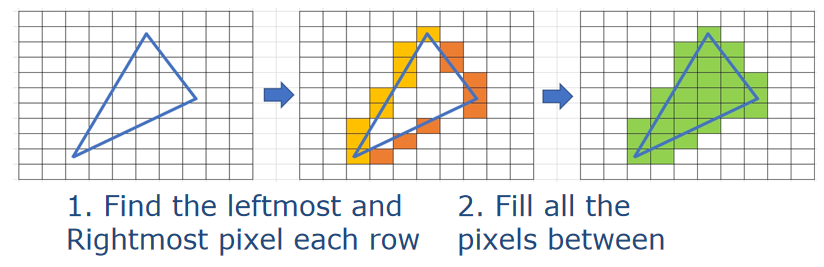
我们在覆盖检测部分使用了“边缘填充光栅化”算法。主要原理是是
为每一行找到最左边和最右边的像素,接着填充之间所有的像素。
接着我们要更新深度缓冲区中的深度值。由于前面的排序,深度值的更新非常简单,
即当子图块被完全覆盖的时候,记录当前的深度值。
现在我们已经完成了遮挡物的部分,获得了深度缓冲区,接着再处理
被遮挡物。
在这部分中,我们
将被遮挡物的 AABB 投影到屏幕空间中,执行简单的碰撞测试,得到早期剔除结果,再通过深度测试查询可见性。
这个方法很简单——也就意味着很快:如果投影面积太小,则被遮挡物将不可见。如果离相机过近,那么被遮挡物将是可见的。实际上,我们可以跳过大约 50% 的被遮挡物查询。
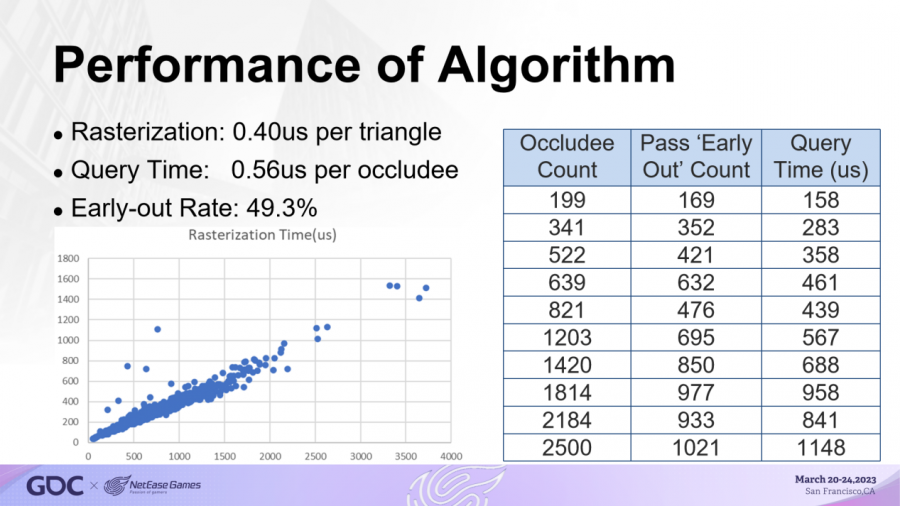
这是我们的轻量级软件遮挡剔除算法的性能数据。
在对遮挡物光栅化时,每个三角形只需花费 0.4 微秒。 对遮挡物进行可见性查询,每个被遮挡物花费 0.56 微秒。 还可以看出,
“Early Out”有效地降低了可见性查询的成本,绕过了几乎 50% 的被遮挡物。
三、优化剔除管线(Optimized Culling Pipeline)
接下来到
剔除管线的部分。
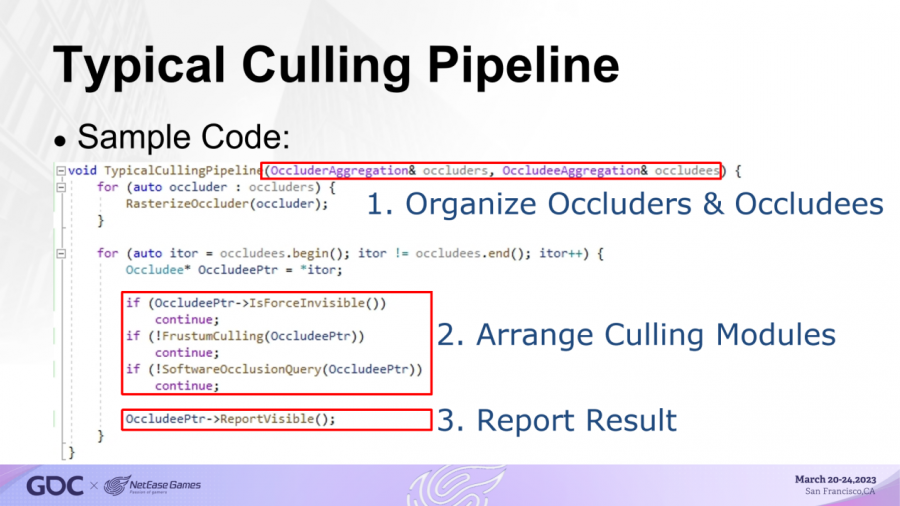
剔除管线需要组合多个剔除模块,以及所有相关数据的组织,包括遮挡物和被遮挡物,并输出报告结果。
下图是一个典型的剔除管线实现方法。
因为过于简单明了,几乎很少人关注它在电脑和主机平台上的应用情况。
然而
在移动平台上,我们发现管线本身的消耗很大。在旧版本的引擎中,渲染5000 个被遮挡物需要 1.5ms 的时间,留给 SOC 的空间很小。因此,我们需要加速渲染管线。
3.1 降低缓存丢失率
3.1.1 数组遍历
首先,我们考虑如何有效地判断被遮挡物。
有两个选择:直接使用普通的数组来管理场景中的物体,或者,空间加速结构。
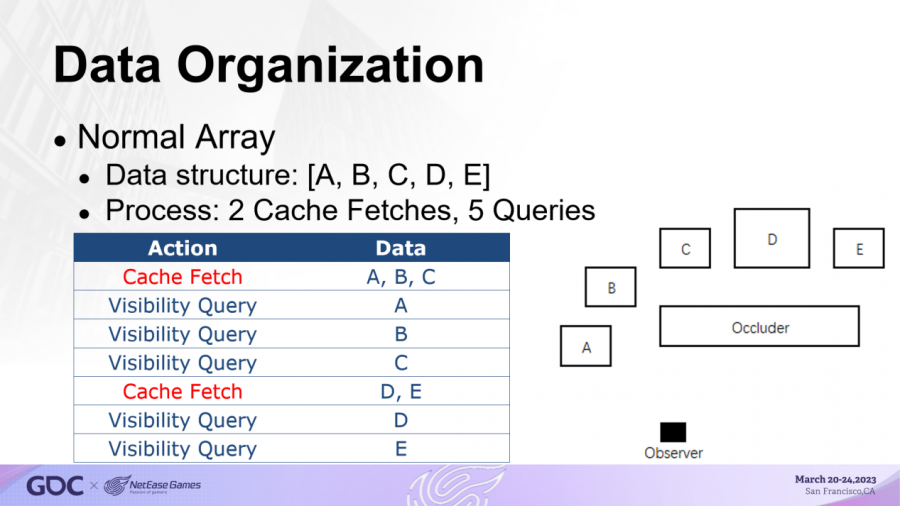
数组
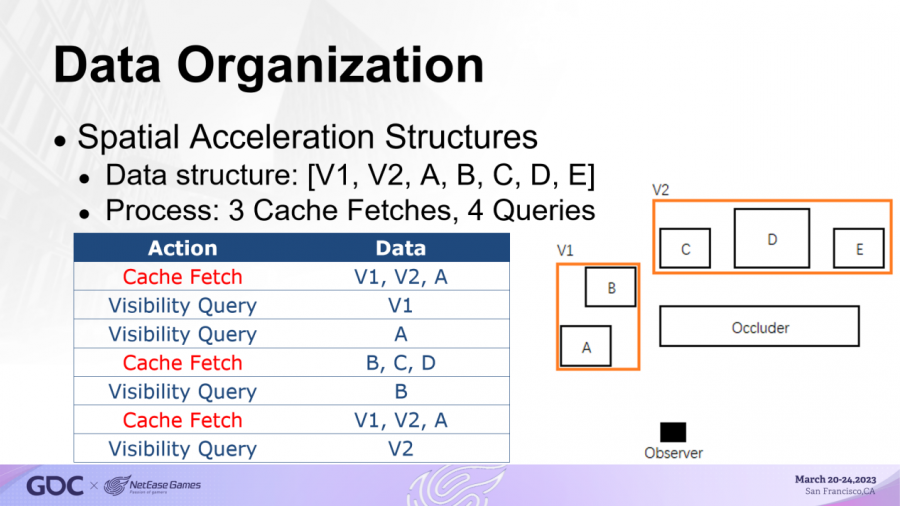
如果我们选择使用数组,策略非常简单:遍历所有被遮挡物来进行判断。这个场景中有5个遮挡物,每次Cache Fetch可以存储3个物体到缓存,则可以看到,需要进行5次可见性查询和2次Cache Fetch。
空间加速结构
而如果使用空间加速结构,例如 边界体层次结构 (Bounding Volume Hierarchy (BHV))或 八叉树(Octree)等方法,就能减少查询次数。
如下图,我们
添加 2个父级包围体积( Parent Bounding Volume(PBV)),V1和V2,一旦被判断为不可见,比如V2,它的所有子级包围体积,C,D,E,都可被设为不可见,无需进一步测试。因此,我们
可以减少 1 次可见性查询。但此时,我们访问内存的方式,相比数组来说,更加的随机。在这种情况下,我们需要3次Cache Fetch,比使用数组多一次。
那么你可能会好奇,如果将数组中的子项和父项放在一起,是否可以减少缓存预取的性能消耗呢?实际上,该方案下内存访问将是线性的,确实可以减少消耗。但是此时维护加速结构的开销会显著增加,考虑到被遮挡物移动的情况下,会需要我们去做更多的工作来维持结构。
两者对比
结合我们的实际情况,在我们的解决方案中,剔除查询的消耗较低,而且游戏中的被遮挡物数量不是那么大,因此跳过的查询次数,无法抵消缓存未命中的消耗,更不用说维护加速结构的额外成本了。所以,
使用数组显然是更好的选择。
由于缓存行(cache line) 的大小通常是固定的。
数据结构越小,Cache Fetch次数越少。所以,我们希望最小化被遮挡区的数据大小。
我们在数据结构中仅存储了相关的数据,并使用尽可能低的数据精度。此外,我们使用位域来最小化布尔值和枚举值 。
通过对数据进行组织和优化,
我们获得了约0.3毫秒的时间性能提升。
3.1.2 函数调用
下一个要解决的问题是函数调用时出现的缓存未命中。
由于虚函数调用导致缓存未命中(cache miss)时,会产生显著消耗。
我们先来看看这些缓存未命中是如何发生的。当调用一个普通函数时,CPU 处理器需要加载该函数的指令。如果指令没有存储在指令缓存中,就会发生缓存未命中。
调用虚函数时,处理器首先需要加载虚表(vtable)指针,然后加载vtable指针引用的函数地址。而加载地址时,有可能会发生缓存未命中。因此最糟糕的情况就是在调用函数时,多了两次缓存未命中。
此外,使用虚函数时,CPU很难预测下一条指令,导致指令执行效率降低。
因此,我们决定删掉所有的虚函数调用,简化操作,解决缓存未命中问题。
这个修改本身并不复杂,但我也有一些小小的建议,来使你更快的完成这类修改:你可以将数据和指令分开存放,这样可以方便地访问数据,也可以通过函数实现面向对象的指令部分;其次,还可以使用不同的数组来存储不同类型的遮挡物信息,并调用特定的通知函数。
通过上述方式,我们获得了
0.5ms 的性能提升。
3.1.3 可见性过滤
下一个问题是可见性过滤器。
什么是可见性过滤器呢?
在一个渲染管线中,一个被遮挡物需要经过多次检测,才能判断为可见。这个过程是多个过滤器的级联,包括逻辑设置、视体剔除,以及软件算法执行遮挡剔除等等。
这个过滤器有两种常见的实现方式。第一种方法是
标记可见性。已标记为不可见的遮挡物将跳过后续测试。第二种方法是使用一个额外的数组来保存过滤后的遮挡物。
第一种方法的缺点是不可见的遮挡物占用了缓存行。而第二个方法则会导致不必要的数据复制消耗。
那么哪个方案更好呢?取决于实际情况。
在我们的项目中,大约 80% 的对象会被视体剔除过滤掉,因此复制操作并不频繁。在这种情况下,我们发现使用
“过滤”方法效率更高,
可节约0.05ms。
3.2 不要光栅化低遮挡的三角形
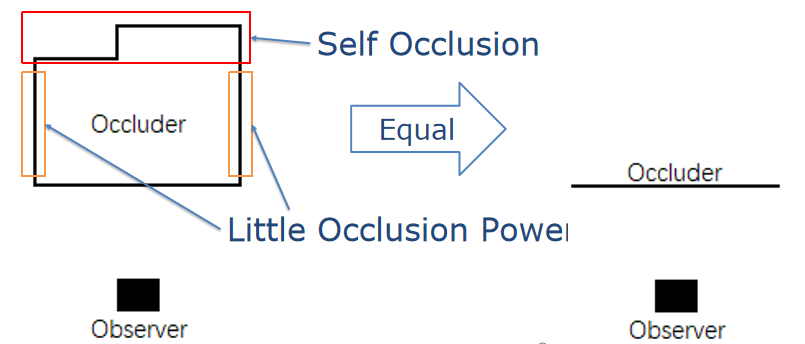
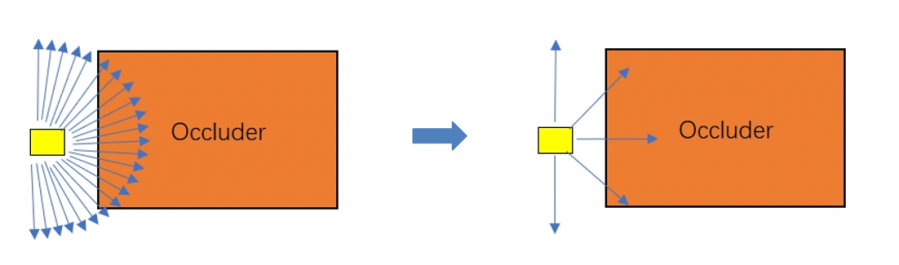
让我们根据上面这张图来分析可见部分。上图中,你可以看到,这个遮挡物,不仅隐藏了被遮挡物,还隐藏了一部分自身——我们称之为自遮挡(Self Occlusion)。此外,平行于观察方向的部分几乎没有遮挡效力。
对场景来说,左边的遮挡物和右边的遮挡物具有相同的遮挡效果,但右边的面数显著低于左边,因此对左边这个遮挡物进行完整的光栅化,算对算力的浪费。
为了解决这个问题,我们将遮挡网格分成多个部分,只光栅化有效部分,也就是我们说的“可见部分”。
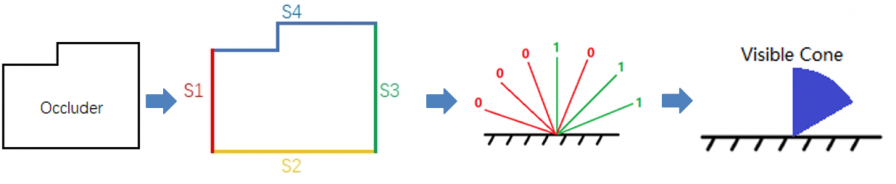
可见部分信息是离线渲染的。我们先
给定一个遮挡网格,根据三角形的法线和位置对三角形进行
聚类,将网格分成几个部分。然后我们从不同的角度拍摄快照,并
计算每个部分的可见尺寸大小。
在这张图中,有一个部分只是一个线段,或者说是平面。
绿线和红线表示不同的观察方向。
0表示在这个视图中方向,完全不可见,可能是被其他部分遮挡了。
这里的 1 是指投影后,这个部分在视线中占1平方米大小。这里的单位是平方米。
通过汇总所有信息,每个部分都可以
用一个视锥体来描述其可见范围。假设我将阈值设为1,视锥体的大小和形状应该能够包含所有可见尺寸等于或大于1平方米的物体。所以我们得到如图所示的锥体。
在运行时,会
使用视锥体来进行可见性测试。如果在运行时,视角方向在可见锥体之外,那么被观察物体的可见尺寸一定小于某个阈值,这部分将被视为不可见。
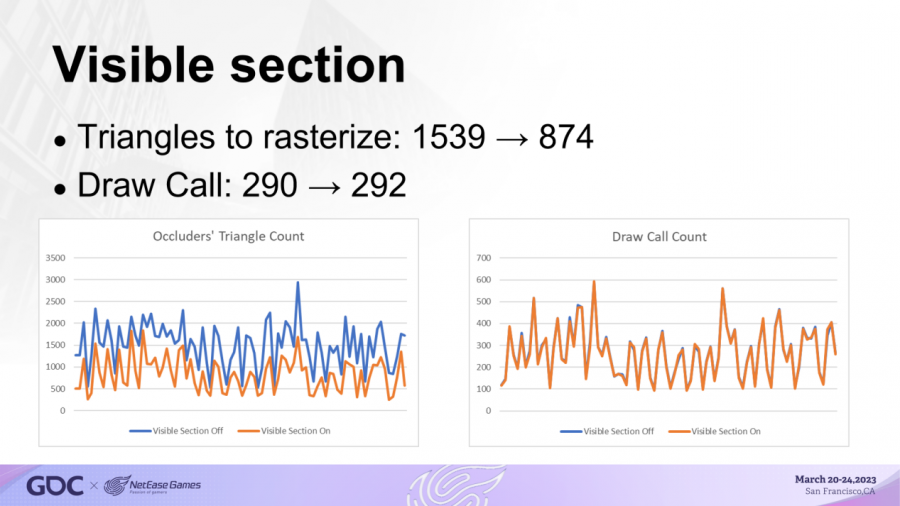
而我们只对那些可见的部分进行光栅化——使用我们的轻量级软件遮挡剔除算法。在实践中,大约 50% 的遮挡三角形可以跳过光栅化过程,并且不会对渲染效果产生严重影响。性能数据显示如下,可以看到需要光栅化的三角形数量从1539降到了874。
3.3 多线程渲染
接下来要解决的是如何在移动平台上使用多线程。
目前,我们的大多数手机都是采用 ARMbig.LITTLE 架构,是一种异构处理器架构。该架构结合了两种不同的处理器核心,一种是高性能的大核,另一种是性能弱但耗能低的小核心。由于大核心已经被逻辑线程、渲染线程占用,所以作业线程不得不跑在小核心上,速度慢很多,另外线程调度的消耗也很大。
因此,我们必须谨慎选择发送给作业线程的任务,该任务在工作线程上运行的时间与主线程上的任务运行时间相匹配,并且足够大,以抵消调度消耗。
最后我们发现
“可见截面选取”和“楔形收集阶段”这两个任务完美地满足了发送给作业线程需求,它们可以和视锥遮挡同时执行。
这么做可以减少0.25ms 的时间。
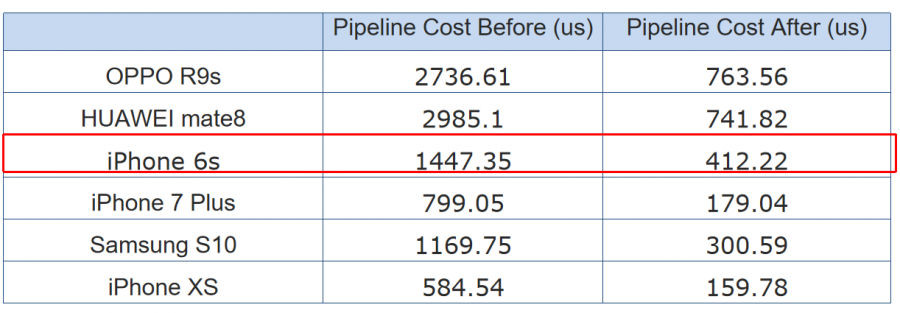
这里展示了剔除管线的数据。可以看到经过优化后,渲染时间得到了大幅减少,特别是在iPhone6s上,时间成本从 1.5ms 减少到大约了0.4毫秒。
四、用于生成高质量遮挡网格的离线生成器(High-quality Occlusion Mesh Generator)
有了一个高效的剔除管线后,接下来我们要为其提供高质量的遮挡体。因此需要打造用于生成高质量遮挡网格的离线生成器。
为什么遮挡网格如此重要?
首先,为了在低端手机上,为了实现在 2ms内完成整个剔除渲染过程,我们需要将遮挡网格的三角形面数设置为4000,这是一个极低的面数要求。与此同时,还要保证遮挡网格是高质量的。否则,即使只是轻微的网格裂缝和偏差,也会导致剔除率急剧下降到35%,偶尔还会出现错误遮挡。
想象一下,常见场景下,画面可能有 100 万个三角形,而被遮挡物的三角形数量可能达到 10 万个。然而,我们只需要渲染4000个三角形,可以实现同样的遮挡效果。
听起来似乎是不可能完成的任务,但是我们做到了。
先简要介绍一下我们的
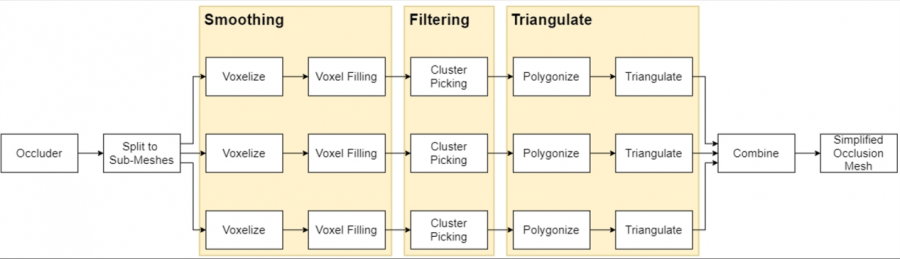
网格生成器。
我们首先通过体素化和填充来对模型进行平滑处理,接着从中过滤出有效的聚类,再将每个聚类中的数据或对象转换为三角形网格来进行渲染。
由于体素化模型不适合表示斜坡或曲面,我们将原始遮挡物按法向方向切割成子模型,再分别进行处理,最后再合并所有子模型的结果。
4.1 平滑过程(Smoothing)
在生成高质量的简化遮挡网格的过程中,我们遇到了很多挑战。在这其中,最难的一点,就是如何去平滑一个3D Mesh。我们尝试了很多方法,最终找出了这个解决方案。
平滑Mesh
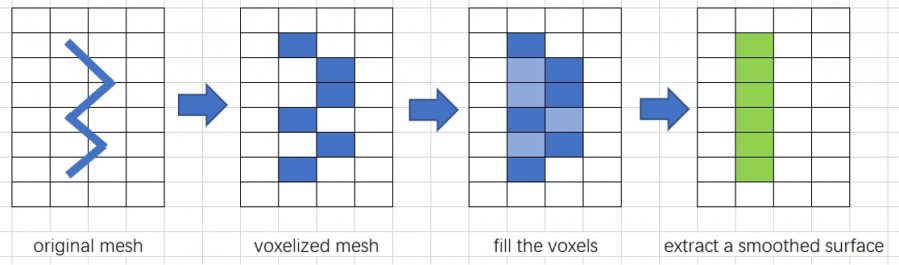
如下图所示,我们的想法是尽可能多地填充体素化模型,得到平滑的Mesh,接着进行提取。
而问题是,如何在确保进行平滑操作后,还不会产生错误遮挡。
我们需要用数学公式来描述“无错误遮挡”的约束条件。因此,我们提出了可视函数的概念。
可视函数
接下来是算法部分,我尽量讲的简单点,避免大家睡着:)。
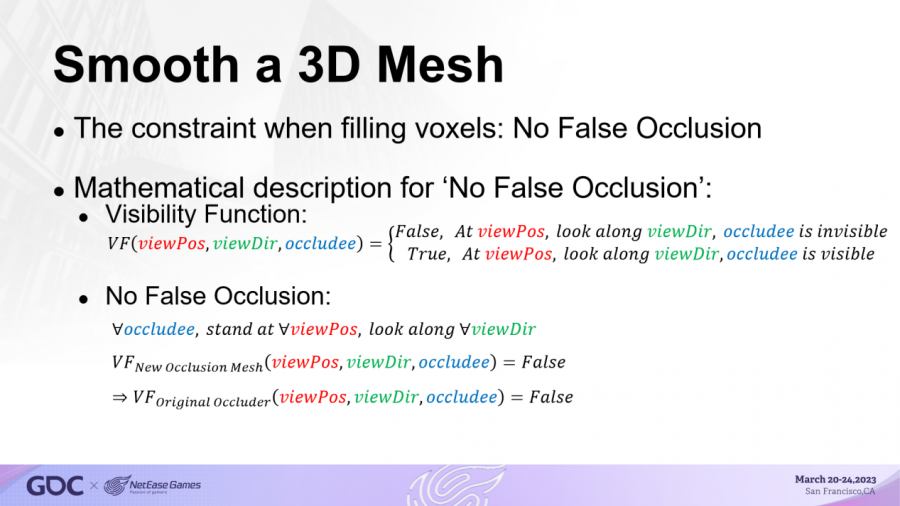
可见性函数的定义很简单,是指从一个任意位置,沿着一条任意方向,去观察一个任意物体,如果物体可见,那么函数结果为 True,反之为 False。
那么我们可以这样描述“无错误遮挡”约束条件:对于任意被遮挡物,在任何位置或任意视线方向,如果在使用简化遮挡网格时,可见性函数为假,则在使用原始网格时,可见性函数也应该为假。如果函数为真,那么说明该物体可以被看到,但如果使用简化网格看不到它,说明物体被错误遮挡了。
这个约束条件仍然很难使用,因为“任意”的条件太多了,所以
我们决定通过近似来简化这个条件。
简化“任意位置”
首先,我们
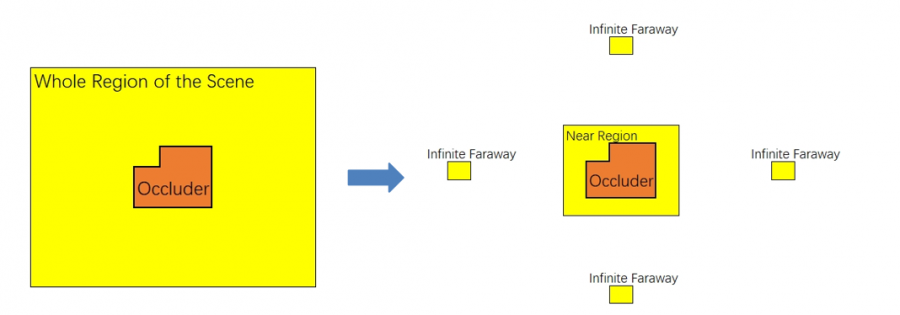
简化“任意位置”, 将任意位置替换为“near 和 far”,其中 near 表示AABB网格的扩展,而“far”表示无穷大。范围如下:
紧接着,对于
“任意方向”,我们将其简化为几个指定的观察方向,在实践中,我们选择 3 条轴和其中线:
最后,我们还要定义
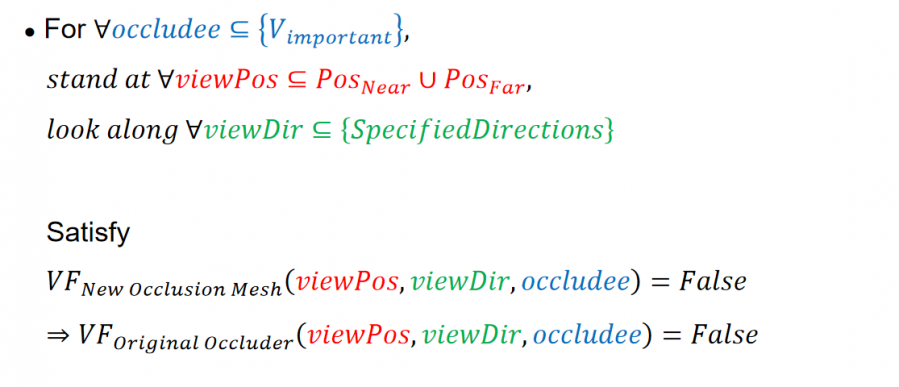
“任意被遮挡物”,这相对复杂一些。我们提出了“重要体素”的概念:
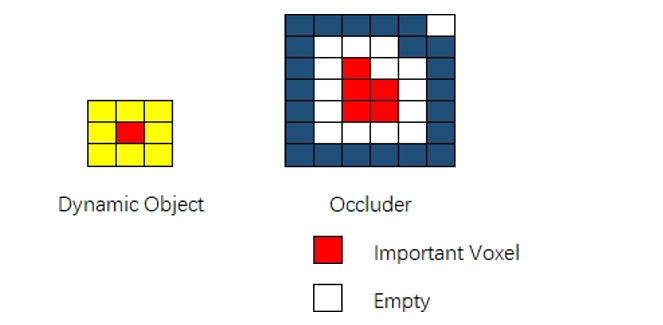
重要体素是那些已经存在了静态物体的地方,以及动态物体中心部分可能出现的地方。然后,我们将约束条件中的“任意被遮挡物”替换为“任意重要体素”。
下图具象说明了什么是重要体素。图中有一个预设的动态对象和一个遮挡物。我们让动态物体在遮挡物内部徘徊,而红色的体素就是中心部分可能出现的地方,也就是重要体素。
我们将约束条件被简化为:对于任意重要体素,在 near 和 far 的位置,沿任何指定的方向观察,如使用简化遮挡网格时,可见性函数为假,则使用原始网格时,可见性函数也必须为假。
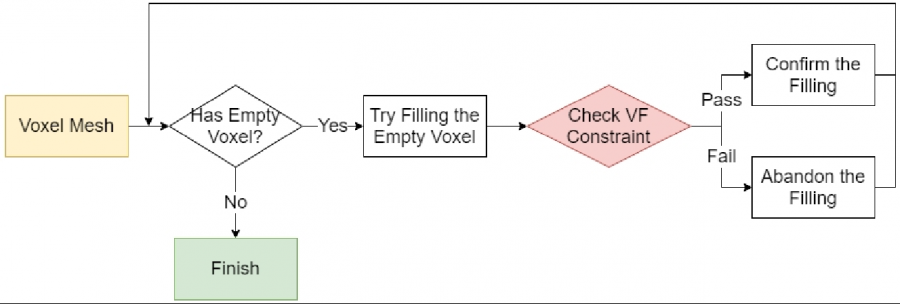
通过约束(Constraint)平滑Mesh
有了约束(Constraint)后,我们的平滑过程就很清晰了。如流程图所示,我们需要遍历所有空的体素,尝试进行填充,并检查约束是否仍然成立。
但是这个遍历过程很耗时,所以在实践中,
我们使用启发式的方法,再通过约束来判断可填充的体素。
这个方法的思路是
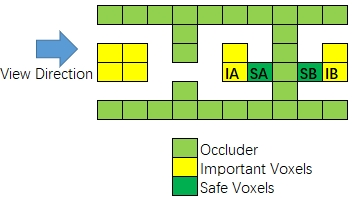
找到 2 个彼此不可见的重要体素,则它们之间的体素一定是可以安全填充位置,因为它们不会干扰重要的体素。这种启发式方法要快得多,结果也可以接受。
以下图为例,Voxel SA 和 SB 位于重要体素 IA 和 IB 之间,而 IA 和 IB 看不到对方。所以SA 和 SB 是安全体素。
这样一来平滑过程就变得简单。在设置可见性函数约束后,我们得出所有安全体素,进行填充,并得到填充的体素网格。
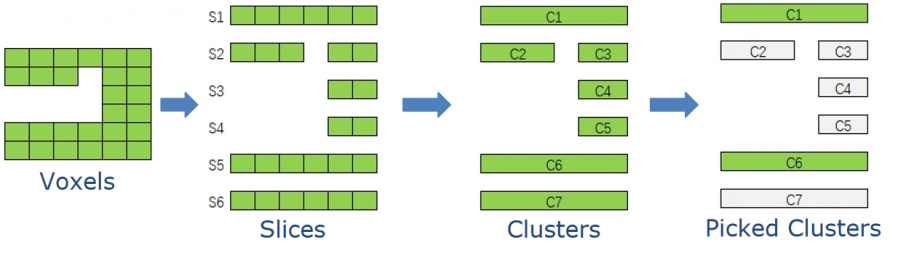
4.2 筛选聚类(Filtering)
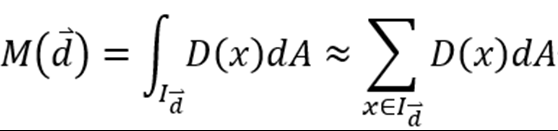
接着,我们需要提取它的有效遮挡部分。我们首先沿着其中一个轴对体素网格进行切片。然后对于每个切片,我们将相连的体素划分为簇,计算簇与簇之间的遮挡关系。然后我们选择遮挡关系高于给定阈值的簇。
理论上讲,一个簇的遮挡关系可以通过下面的公式来计算得到,但是这个过程很慢。因此我们最终没有使用这个方案,这就里不再详细说明这个公式。
我们同样提出了一种启发式方法。我们首先找到满足这样条件的重要体素:当它被原始模型包围时,可见性函数的返回值为假,当它被所有当前选择的簇包围时,其可见性函数的返回值为真。接着标记可以遮挡这些重要体素的簇,
将标记的数量作为遮挡信息的近似值。
在实践中,
这种启发式方法与基准真相( ground truth) 相比,计算速度快10 倍,并且结果也很棒。
4.3 转化为三角形(Triangulating)
而选中簇之后,接下来就是将它们转换成三角形。我们使用了常见的做法。
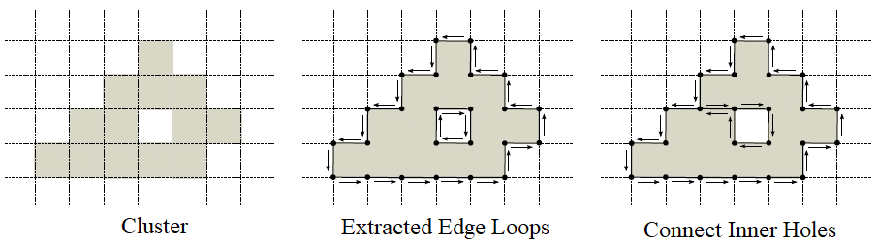
首先,我们先提取出边界信息,并将孔洞与边界相连接,从而将每个簇转换为边缘循环。
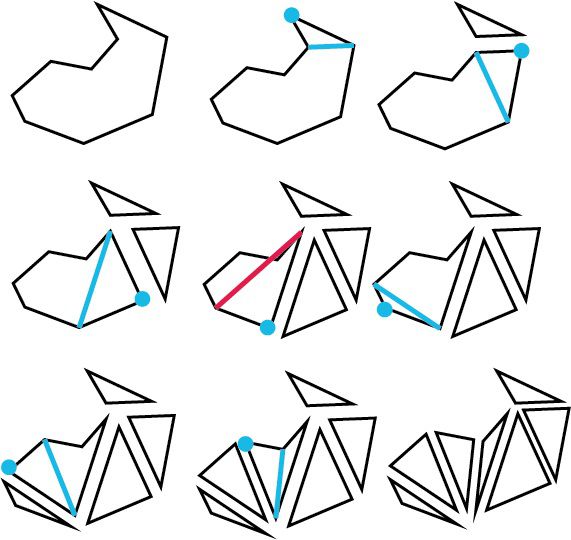
然后,我们通过经典的道格拉斯-普克算法(Ramer-Douglas-Peucker)算法沿边缘曲线循环简化。
之后,我们使用经典的切耳法(Ear Clipping)算法对多边形进行三角剖分,从而得到结果。
对于方形遮挡物,这样处理后的结果已经可以接受。
但是我们还有许多斜面和曲面的遮挡物。
解决这个问题的思路很简单。我们从原始模型中
分离出斜坡和曲面,形成一个独立的子模型。用前面的提到方法简化它们,接着将所有部分的结果结合起来,并将它们之间的间隙焊接起来,得到最终的遮挡网格。
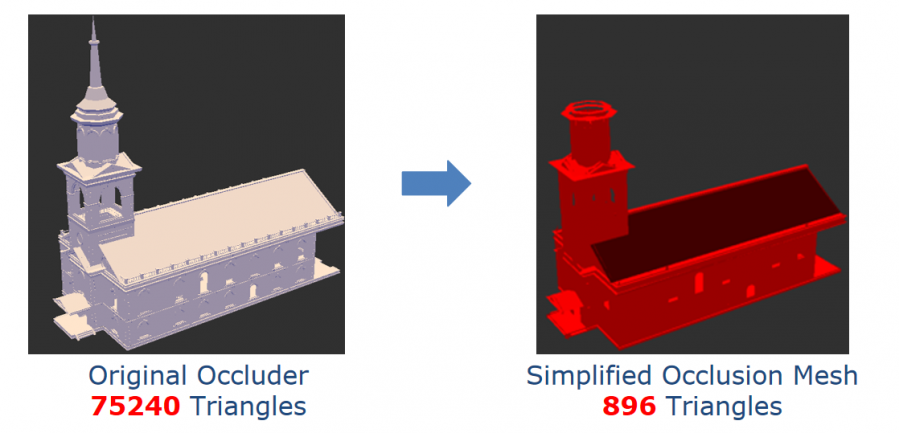
现在我们得到最终的结果,就是一个简化的高质量遮挡网格,如下面的案例。
这座教堂有 75240个三角形,而简化的遮挡网格使用了不到900个三角形。你可以看到凹凸不平的墙壁被平滑了,塔尖被自动移除,因为塔尖基本不具备遮挡效果。
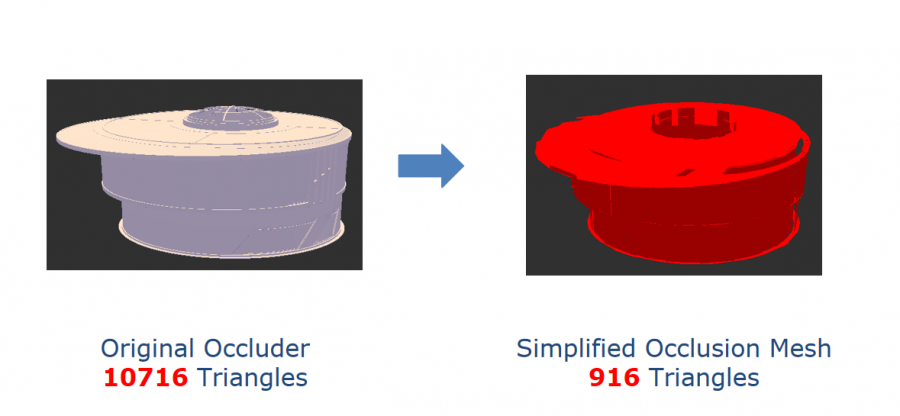
而这里的圆形体育场,原来有大约 10k 个三角形,简化后只剩下 900 个三角形。可以看到到生成器对于曲面非常有效。
我们的生成器生成的最终简化遮挡网格大约是原始三角形数量的5%,并且不会产生任何错误遮挡效果。
总结
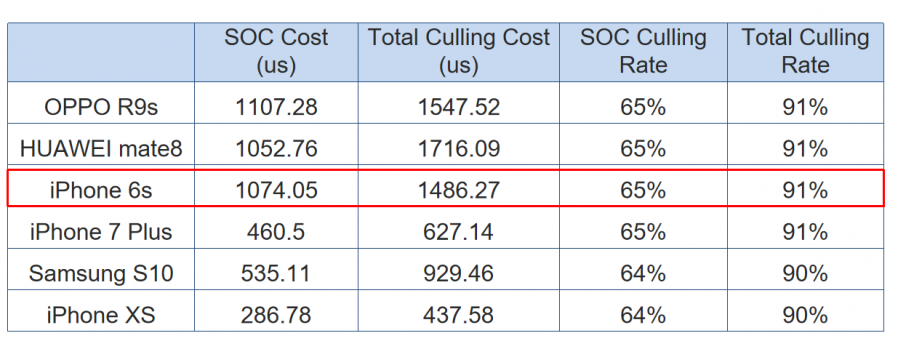
下表显示了从高端到低端的不同机型的性能数据,可以看到我们在2ms 内剔除了 65% 的对象。
以Iphone 6s为例,我们的 SOC 算法可以在1ms 内减少 65% 的绘制调用,而不会发生任何错误遮挡。对于整个剔除解决方案,时间是1.5ms,总剔除率约为 91%。
针对移动平台的高效软件遮挡剔除解决方案,需要综合考虑各个方面。如:
- 使用轻量级 SOC 算法来适配移动平台。
- 构建缓存友好和多线程运行的剔除管线。
- 用于高质量的遮挡网格的生成器。生成器可以基于可见性函数来制作。
这就是我们在《明日之后》中所实现的解决方案,这不是一项简单的任务。没有我们出色的开发团队,就无法实现这套解决方案。感谢大家倾听!






 Steam
Steam  App Store
App Store 











 闽公网安备 35020302034348号
闽公网安备 35020302034348号